Clumsy Robot
Michael Rosenblatt
1st year Master's student, MIT Media Lab
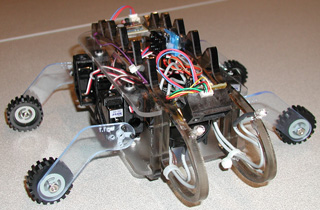
Clumsy Robot was built to explore how people interact with robot toys.
Clumsy Robot is currently implemented using a MIT Cricket controller, a few sensors, a servo controller device, and a radio data transmitter. He moves with 8 micro-servos and his body is constructed using rapid fabrication technologies found here at the Media Lab.
As people interact with him, radio data is transmitted back to a laptop computer where a proce55ing graphics program displays several internal state variables: coldness, happyness, and fear (Clumsy is scared of heights). The ultimate goal is to develop a robot that is mobile and self-charging, that people will form a "magical-imaginary" relationship with, similar to those formed with stuffed toys.
Related Work: