 |
|
overview
quicktime movie:
|
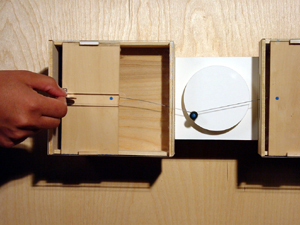
Interacting
with the physical box involves triggering one of two sensors mounted
to the surface of the object. Triggering the right sensor causes the
motor to turn clockwise while triggering the left sensor causes the
motor to turn counterclockwise. Triggering both sensors at the same
time causes the motion to stop. The electronics used for this box are
all analog.
|
|||||||||||||||||||||


| Casey
Reas
( reas@media.mit.edu ) | |